Quaternions, IMU et une appli C++ sans fil qui ne ment pas sur la dérive
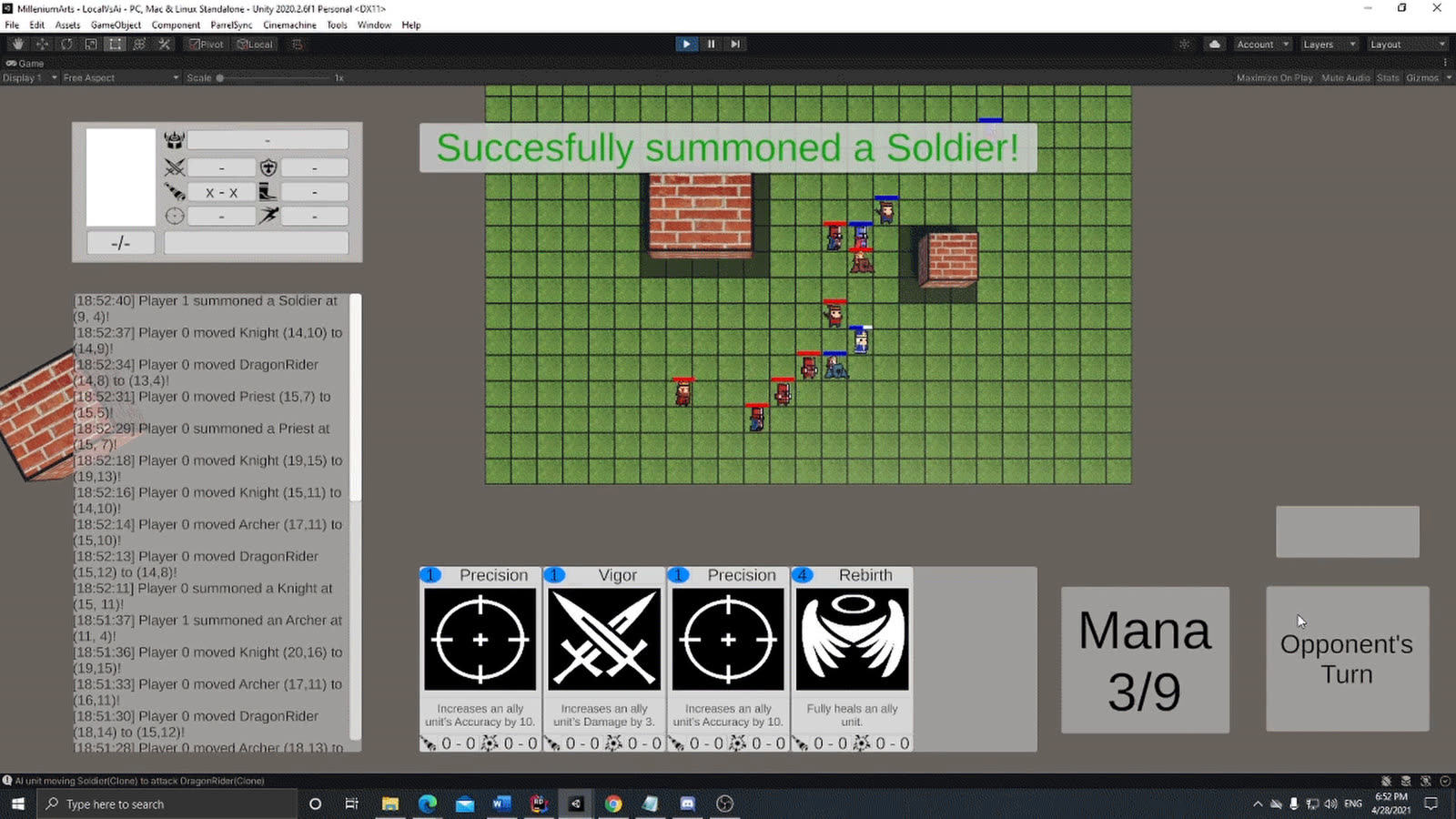
Lire des données IMU en sans fil et les transformer en rotation 3D stable dans OpenGL, c'est surtout un exercice de lutte honnête contre la dérive. Le matériel ment ; les maths vous disent quand.
La plupart des projets mocap débutants intègrent les lectures de gyro en angles d'Euler et regardent le modèle partir dans le décor au bout de deux minutes. Les quaternions plus une étape de fusion de capteurs honnête (accéléro pour l'inclinaison, magnéto pour le cap, gyro pour le court terme) donnent un signal utilisable tant que l'utilisateur continue à bouger.
Le multiplateforme était la discipline
Construire la même appli C++ sur Linux, macOS et Windows a forcé une séparation honnête entre transport, parsing des capteurs et rendu. C'est le genre de nettoyage structurel qu'on ne fait que parce qu'on y est contraint, et c'est la seule raison pour laquelle le code est encore lisible des années plus tard.
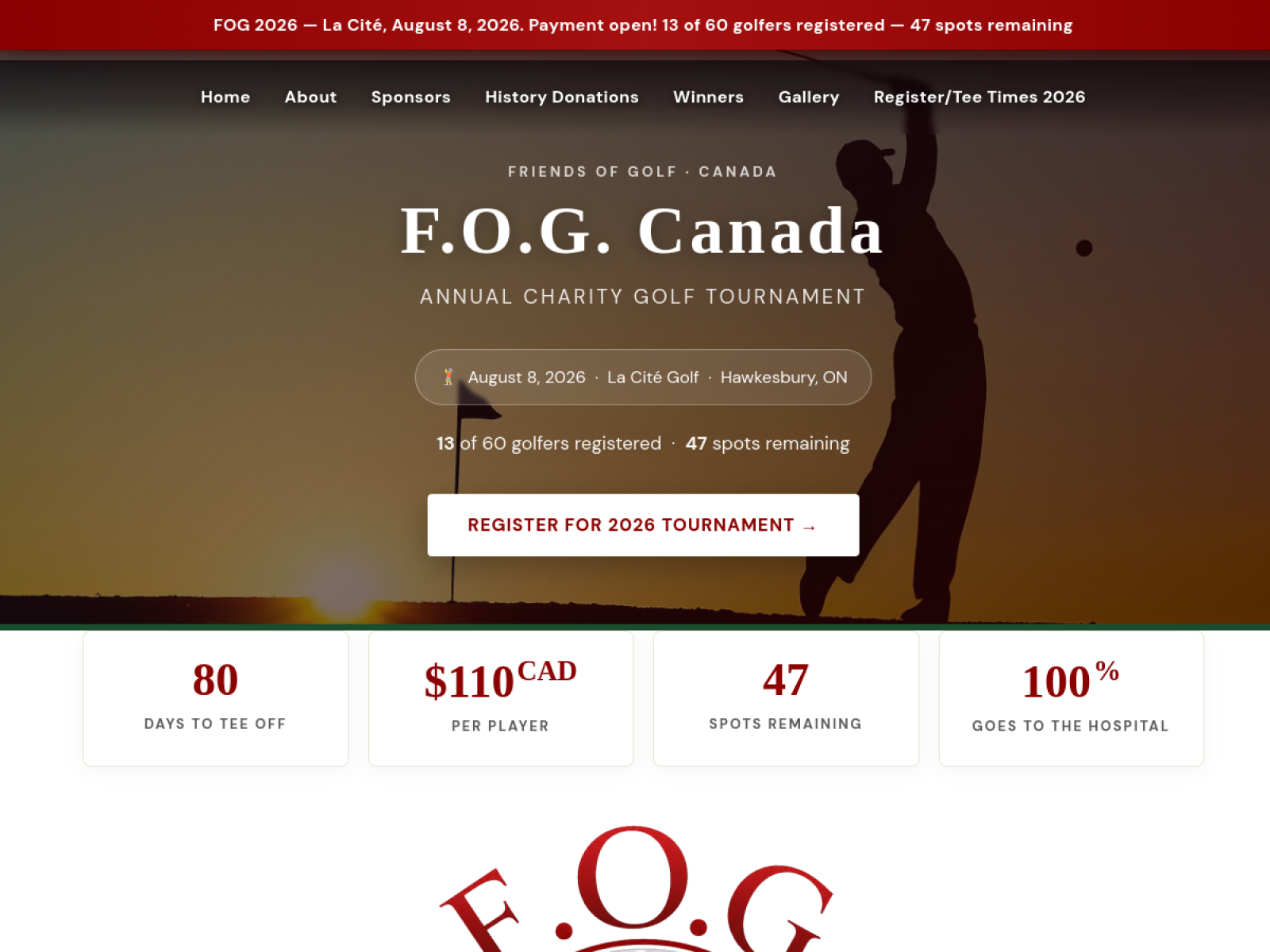
Un site caritatif qu'une équipe non-technique peut vraiment maintenir
F.O.G. Canada (Friends of Golf) lève des fonds pour des causes communautaires via un tournoi de golf annuel. La consigne était simple : livrer un site que l'équipe peut modifier elle-même entre les cycles. WordPress + Elementor, ajusté pour des non-développeurs, avec des paliers de commandite en glisser-déposer.
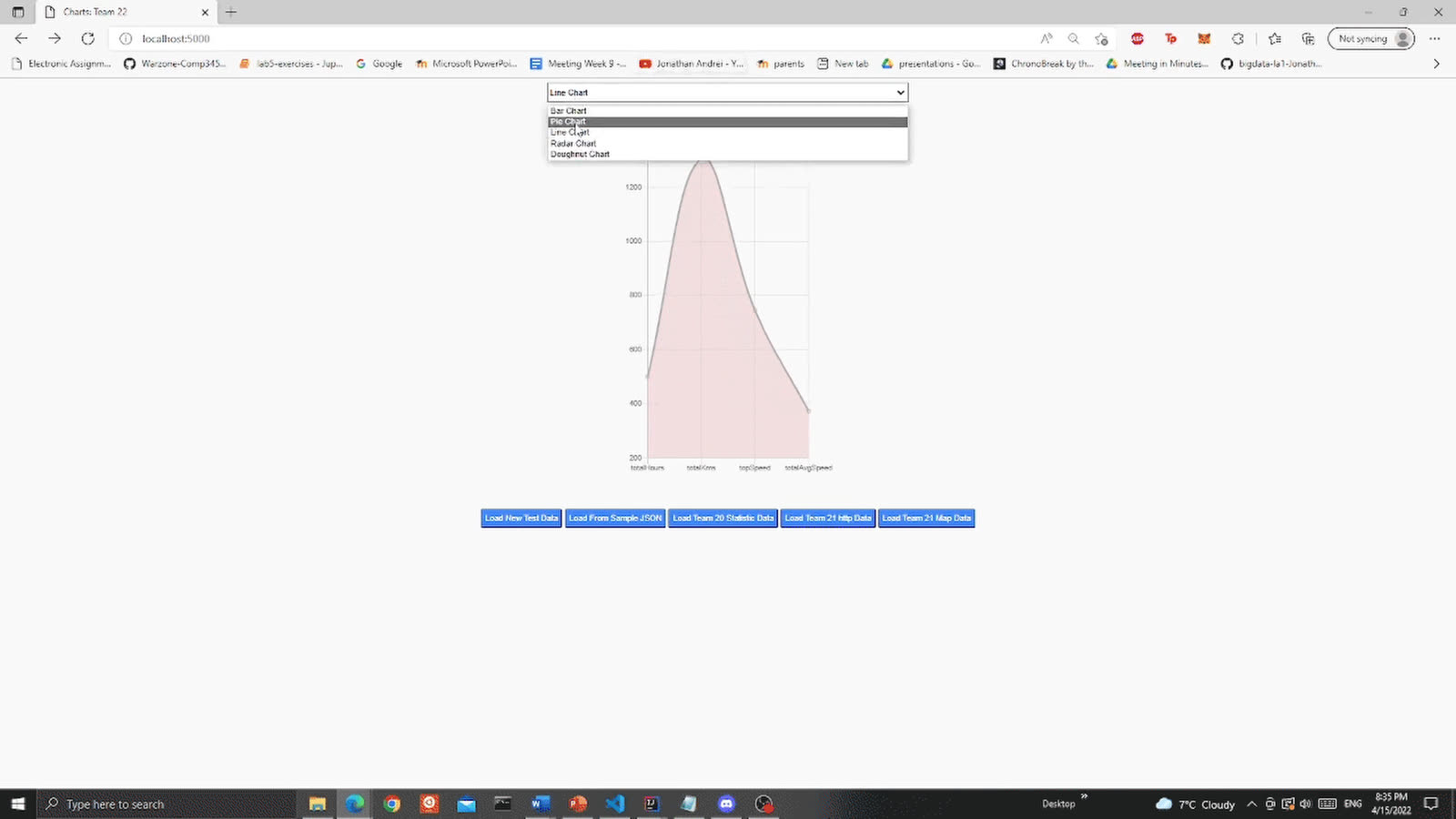
Pourquoi j'ai utilisé le patron Observer pour une mini-appli de fitness
Le patron Observer s'enseigne comme un exemple de manuel. Construire un graphique de fitness temps réel mis à jour par plusieurs sources lui a fait gagner sa place.