Quaternions, IMUs, and a Wireless C++ App That Doesn't Lie About Drift
Reading IMU data over wireless and turning it into a stable 3D rotation in OpenGL is mostly an exercise in fighting drift honestly. The hardware lies; the math tells you when.
Most beginner mocap projects integrate gyro readings into Euler angles and watch the model spin off into the void after two minutes. Quaternions plus an honest sensor-fusion step (accel for tilt, mag for heading, gyro for short-term) buys you a usable signal for as long as the user keeps moving.
Cross-platform was the discipline
Building the same C++ app on Linux, macOS, and Windows forced an honest separation between transport, sensor parsing, and rendering. It's the kind of structural cleanup you only do because you have to, and it's the only reason the code is still understandable years later.
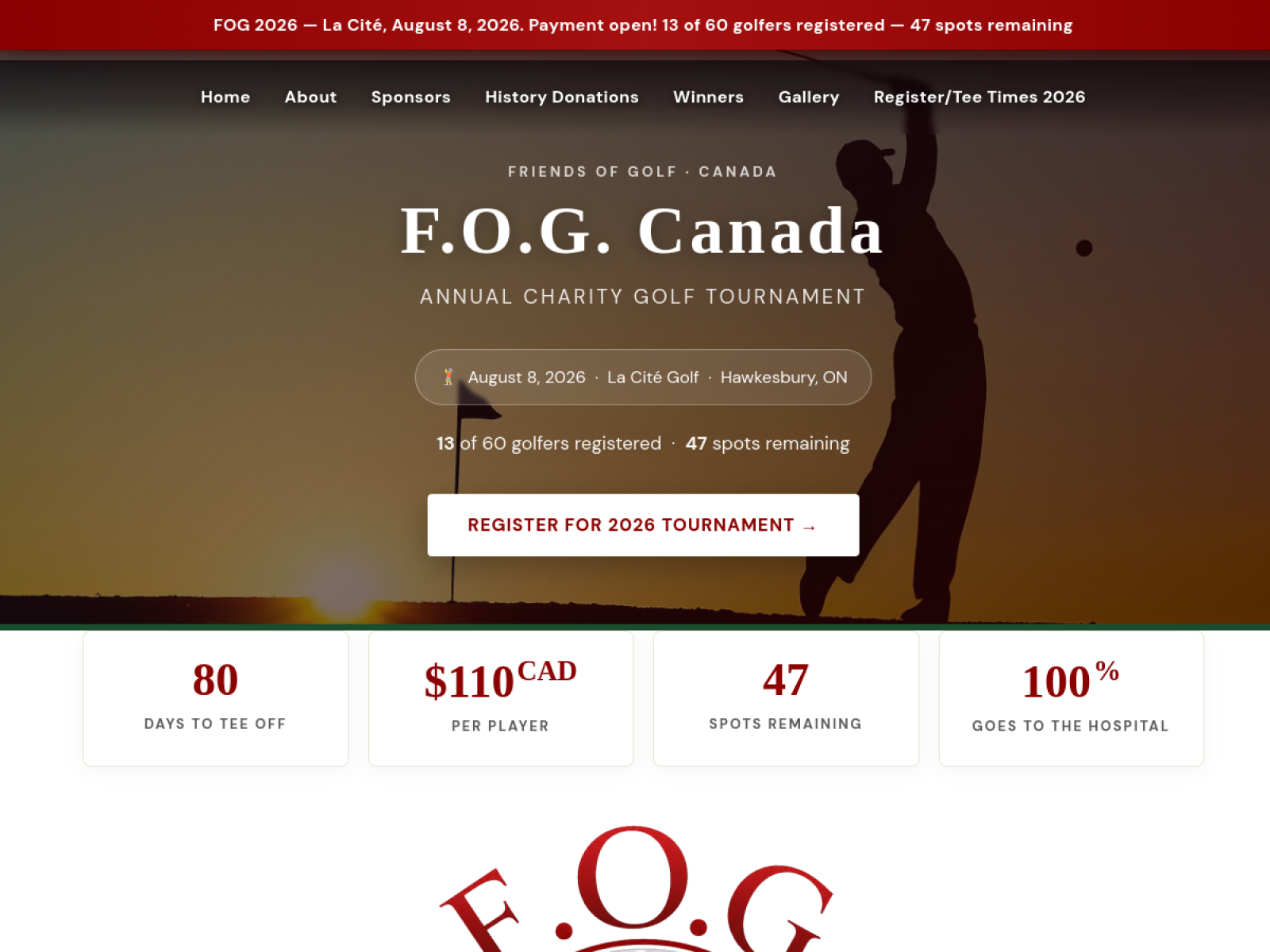
Building a Charity Site Non-Developers Can Actually Maintain
F.O.G. Canada (Friends of Golf) raises money for community causes through an annual golf tournament. The brief was simple: ship a site the team can edit themselves between cycles. WordPress + Elementor, tuned for non-developers, with sponsorship tiers as drag-and-drop modules.
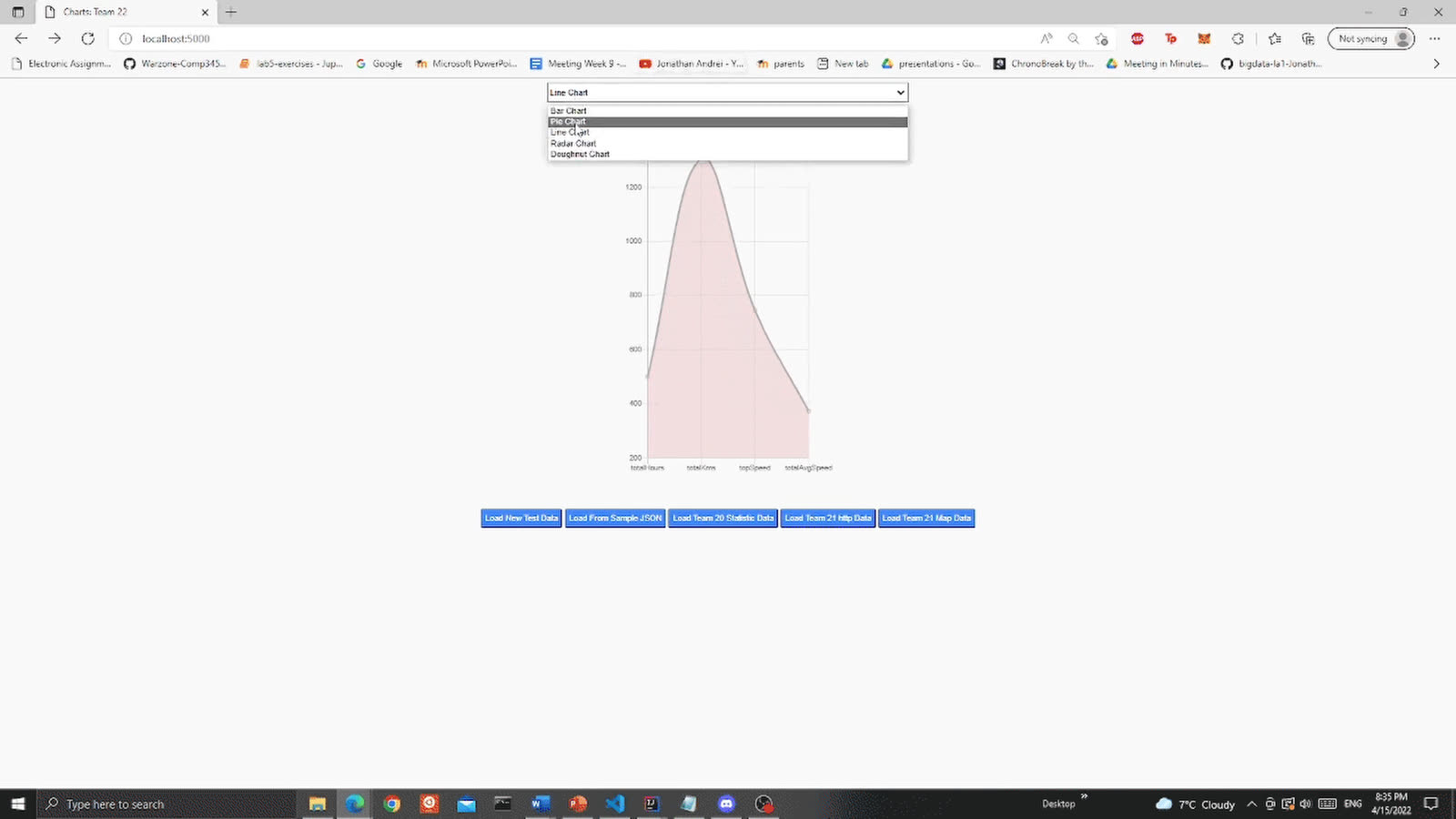
Why I Used the Observer Pattern for a Tiny Fitness App
The observer pattern gets taught as a textbook example. Building a real-time fitness chart that updates from multiple sources made it earn its keep.